1. Įvadas
„Matek Mateksys AP_PERIPH CAN-L4-BM“ yra itin tikslus skaitmeninis galios monitorius, skirtas taikymams, kuriems reikalingas tikslus srovės ir įtampos matavimas.tagMatavimai atliekami per CAN magistralę. Jame naudojama TI INA239 mikroschema ir veikia su „ArduPilot AP_Periph“ programine įranga, palaikančia CAN/DroneCAN protokolą. Šis įrenginys užtikrina patikimą energijos stebėjimą be kalibravimo.
2. Savybės
- Itin tikslus skaitmeninis galios stebėjimas.
- Remiantis TI INA239 ir ArduPilot AP_Periph programine įranga.
- Palaiko CAN/DroneCAN protokolą.
- Tiksliai srovei ir magistralės tūriui kalibruoti nereikiatage rodmenys.
- Maži galios nuostoliai dėl 200 µΩ tipinės laidžiojo kelio varžos.
3. Specifikacijos
- MCU: STM32L431xC, 256 KB „Flash“ atmintis
- Maitinimo monitoriaus integrinė grandinė: INA239 (85 V, 16 bitų, didelio tikslumo)
- Baterijos tūristage Sense įvestis: 0~85V
- Srovės jutimo diapazonas: 0~204.8A
- Apkrovos srovė jutimo rezistoriuje: 150 A (nuolatinė), 204.8 A (srovių pliūpsnis)
- ttage Tikslumas: 0.1 %
- Dabartinis tikslumas: 2%
- Sąsaja: CAN (DroneCAN protokolas), UART2 (atsarginis, DFU), ST derinimas (SWCLK ir SWDIO)
- Maitinimas: 4.5–5.5 V esant 5 V įtampai
- Energijos suvartojimas: 10 mA
- Darbinės temperatūros: -40-85 °C
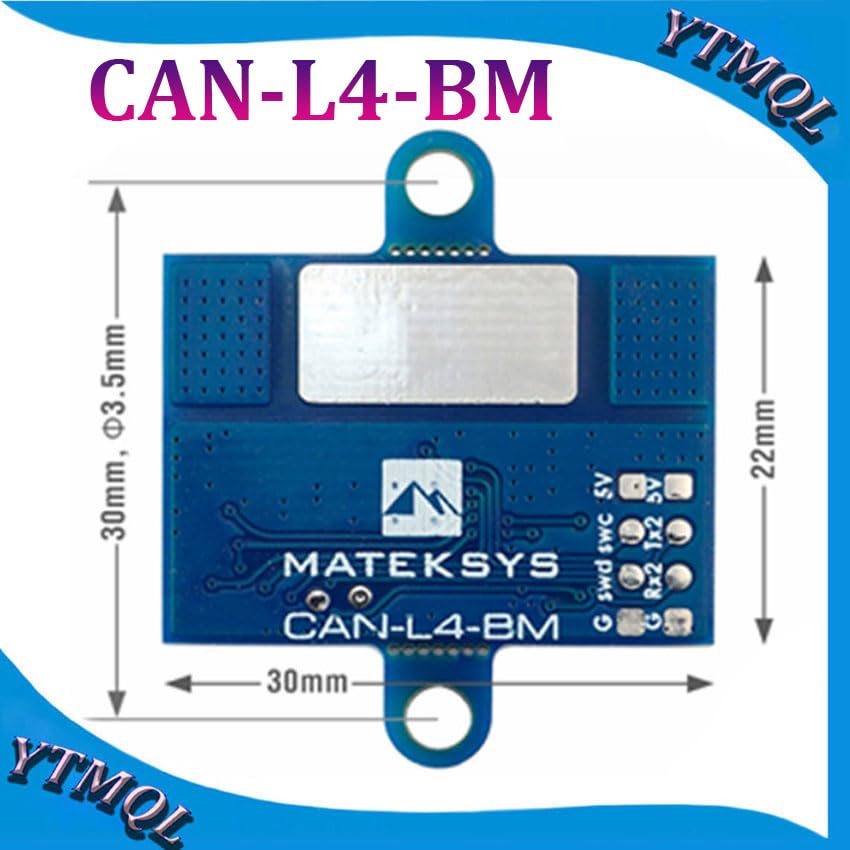
- Lentos dydis: 30 mm x 22 mm x 3 mm
- Svoris: 4g
- Firmware: „ArduPilot AP_Periph“ (atnaujinimas naudojant „DroneCAN GUI“ įrankį)
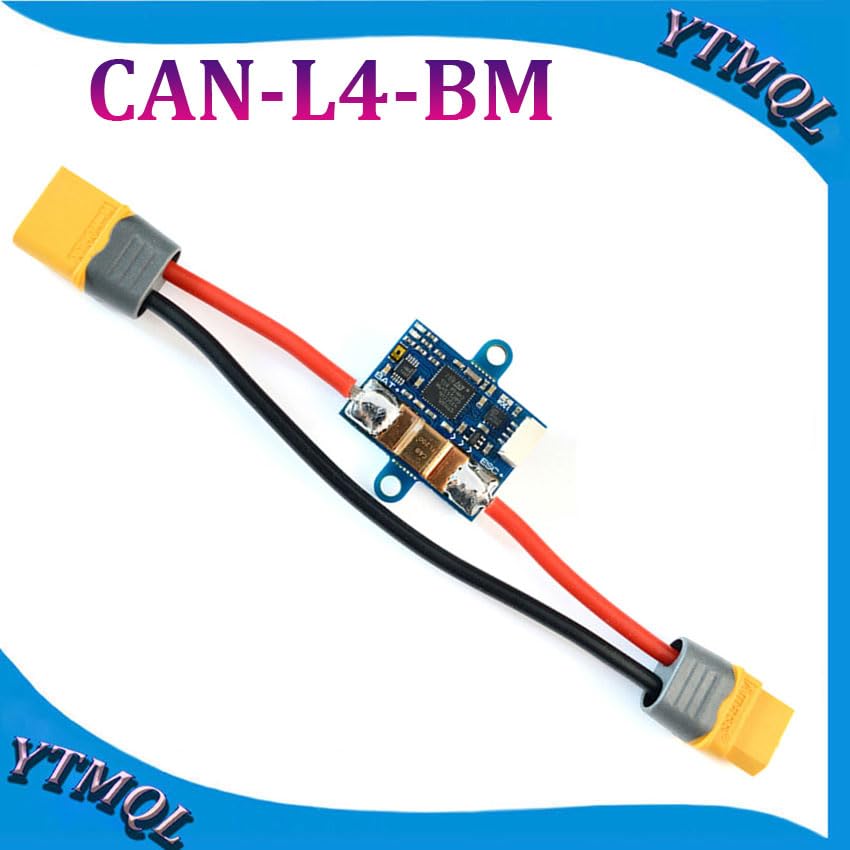
4. Produktas baigtasview
Komponentų išdėstymas


5. Sąranka ir diegimas
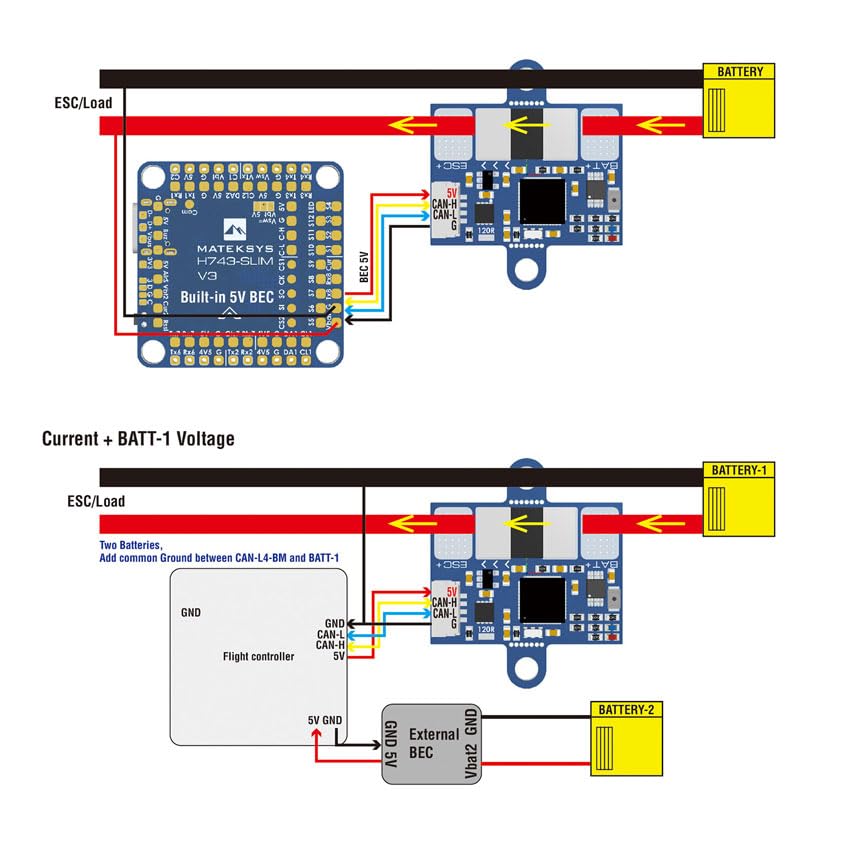
Laidų sujungimo instrukcijos
Tinkamas laidų sujungimas yra labai svarbus norint tiksliai rodyti duomenis ir saugiai naudoti CAN-L4-BM.

Bendrieji laidų patarimai
- Optimaliam tikslumui lituokite teigiamus laidus kuo arčiau abiejų srovės jutimo rezistoriaus pusių plokštėje.
- Užtikrinkite bendrą įžeminimo jungtį tarp skrydžio valdiklio ir ESC/Load, kad išvengtumėte įžeminimo kilpų ir užtikrintumėte stabilų veikimą.
- Jei CAN laidai per ilgi, sujunkite 120R trumpiklį CAN-L4-BM plokštėje, kad išlaikytumėte signalo vientisumą.
- Didelis kilimėlis plokštės apačioje yra neveikiantis ir neturi grandinės tinklo; prireikus jį galima naudoti kaip konstrukcinę atramą.
- Jei montuojant ribotoje erdvėje nereikia, dvi tvirtinimo ausis galima atsargiai nupjauti.
Firmware konfigūracija
CAN-L4-BM veikia su „ArduPilot AP_Periph“ programine įranga. Konfigūracija atliekama naudojant „DroneCAN“ protokolą per skrydžio valdiklio nustatymus.
- Prijunkite CAN-L4-BM prie skrydžio valdiklio CAN magistralės prievado.
- Nustatykite atitinkamą skrydžio valdiklio programinės įrangos parametrą, kad įjungtumėte CAN tvarkyklę:
- CAN magistralei1:
CAN_P1_DRIVER = 1 - CAN magistralei2:
CAN_P2_DRIVER = 1
- CAN magistralei1:
- Konfigūruokite akumuliatoriaus stebėjimą nustatydami:
BATTx_MONITOR = 8(DroneCAN-BatteryInfo), kur „x“ atitinka konfigūruojamą akumuliatoriaus stebėjimo įrenginio egzempliorių. - CAN-L4-BM programinės įrangos atnaujinimus galima atlikti naudojant „DroneCAN GUI Tool“.
6. Operacija
LED indikatoriai
- Mėlynas šviesos diodas (greitai mirksi): Rodo, kad plokštė paleidžiama.
- Mėlynas šviesos diodas (lėtai mirksi): Rodo, kad plokštė veikia tinkamai ir bendrauja per CAN.
- Raudonas šviesos diodas: Rodo, kad plokštėje yra 3.3 V maitinimas.
Duomenų stebėjimas
Tinkamai sukonfigūravus ir įjungus skrydžio valdiklį, bus rodoma tiksli srovė ir magistralės įtampa.tagDuomenys iš CAN-L4-BM perduodami per „DroneCAN“ magistralę. Šiuos duomenis galima registruoti ir stebėti naudojant skrydžio valdiklio telemetrijos sistemą arba suderinamą antžeminės stoties programinę įrangą.
7. Priežiūra ir geriausia praktika
- Reguliariai tikrinkite visas lituotas jungtis, ar nėra vientisumo ir susidėvėjimo ar korozijos požymių.
- Kad plokštė veiktų optimaliai ir tarnautų ilgai, ją laikykite švarią nuo dulkių, drėgmės ir šiukšlių.
- Nors CAN-L4-BM darbinė temperatūra yra plati, užtikrinkite tinkamą vėdinimą, jei įrenginį naudojate uždarose patalpose.
- Venkite plokštės veikimo ekstremaliose aplinkos sąlygose (pvz., per didelėje drėgmėje, tiesioginiame sąlytyje su vandeniu), kurios viršija nurodytą veikimo diapazoną.
8. Problemų sprendimas
Bendros problemos
- Nėra duomenų iš monitoriaus:
- Patikrinkite, ar visos CAN magistralės jungtys (CAN-H, CAN-L, GND, 5V) yra tvirtos ir teisingos.
- Patikrinkite LED indikatorius, ar jie tinkamai įsijungia ir veikia (lėtas mėlynas mirksėjimas rodo įprastą veikimą).
- Užtikrinti
CAN_P1_DRIVERorCAN_P2_DRIVERyra teisingai nustatytas skrydžio valdiklio parametruose. - Patvirtinkite tai
BATTx_MONITOR = 8yra nustatytas tinkamam akumuliatoriaus stebėjimo egzemplioriui. - Patikrinkite, ar nėra trumpųjų jungimų arba neteisingo garsumotagMaitinimas CAN-L4-BM plokštei.
- Netikslūs rodmenys:
- Įsitikinkite, kad teigiami laidai yra lituoti kuo arčiau srovės jutimo rezistoriaus plokštėje.
- Patikrinkite bendrus įžeminimo ryšius tarp visų maitinimo sistemos komponentų.
- Patikrinkite, ar plokštė ar jos komponentai nėra fiziškai pažeisti, galintys turėti įtakos jutiklio tikslumui.
- Plokštė neįsijungia:
- Įsitikinkite, kad į 5 V kontaktą/išvestį tiekiama stabili 4.5–5.5 V įtampa.
- Patikrinkite raudoną 3.3 V indikatoriaus šviesos diodą; jei jis nešviečia, gali būti maitinimo problema.
- Patikrinkite visus maitinimo laidus, ar nėra nutrūkimų ar neteisingų jungčių.
9. Kontaktai ir palaikymas
Dėl papildomos pagalbos, techninės pagalbos ar papildomų išteklių žr. oficialią „Mateksys“ dokumentaciją, esančią jų svetainėje. websvetainėje arba atitinkamuose bendruomenės forumuose, skirtuose „ArduPilot“ ir „DroneCAN“ naudotojams.





