![]() PandarasView 2
PandarasView 2
Taško debesis
Vizualizacijos programinė įranga
Vartotojo vadovas
PandarasView 2 taškų debesies vizualizacijos programinė įranga
www.hesaitech.com
 HESAI Wechat
HESAI Wechat
http://weixin.qq.com/r/Fzns9IXEl9jorcGX92wF
Dokumento versija: PV2-en-230710
Apie šį vadovą
■ Šio vadovo naudojimas
- Prieš naudodami pirmą kartą, būtinai perskaitykite šį vartotojo vadovą ir vadovaukitės čia pateiktomis instrukcijomis, kai naudojate gaminį. Jei nesilaikysite instrukcijų, galite sugadinti gaminį, prarasti turtą, sužaloti asmenis ir (arba) pažeisti garantiją.
- Šiame vartotojo vadove nėra informacijos apie gaminio sertifikatus. Patikrinkite gaminio apatinėje plokštelėje esančius sertifikavimo ženklus ir perskaitykite atitinkamus sertifikavimo įspėjimus.
- Jei į savo gaminį (-ius) įdedate šį „lidar“ gaminį, turite pateikti šį vartotojo vadovą (arba priemones, kaip pasiekti šį vartotojo vadovą) numatytiems jūsų produkto (-ių) naudotojams.
- Šis lidar produktas yra galutinio produkto komponentas. Jis turi būti įvertintas galutiniame produkte pagal atitinkamus standartus.
■ Prieiga prie šio vadovo
Norėdami gauti naujausią versiją:
- Apsilankykite Hesai oficialaus atsisiuntimo puslapyje websvetainė: https://www.hesaitech.com/en/download
- Arba susisiekite su savo pardavimo atstovu Hesai
- Arba susisiekite su Hesai techninės pagalbos komanda: service@hesaitech.com
■ Techninė pagalba
Jei jūsų klausimas šiame vartotojo vadove nepateiktas, susisiekite su mumis šiuo adresu:
service@hesaitech.com
www.hesaitech.com/en/support
https://github.com/HesaiTechnology (Palikite savo klausimus atitinkamuose „GitHub“ projektuose.)
■ Legendos
![]() Įspėjimai: instrukcijas, kurių reikia laikytis siekiant užtikrinti saugų ir tinkamą gaminio naudojimą.
Įspėjimai: instrukcijas, kurių reikia laikytis siekiant užtikrinti saugų ir tinkamą gaminio naudojimą.
![]() Pastabos: papildomos informacijos, kuri gali būti naudinga.
Pastabos: papildomos informacijos, kuri gali būti naudinga.
Įvadas
PandarasView 2 yra antros kartos programinė įranga, kuri įrašo ir rodo taškų debesies duomenis iš Hesai lidars, pasiekiama:
- 64 bitų Windows 10
- Ubuntu 16.04 / 18.04 / 20.04
![]() Jei jūsų kompiuteryje naudojama AMD vaizdo plokštė ir veikia Ubuntu-20.04, atsisiųskite Ubuntu-20.04 palaikančią grafikos tvarkyklę iš oficialios AMD websvetainę. Norėdami gauti papildomų instrukcijų, susisiekite su Hesai technine pagalba.
Jei jūsų kompiuteryje naudojama AMD vaizdo plokštė ir veikia Ubuntu-20.04, atsisiųskite Ubuntu-20.04 palaikančią grafikos tvarkyklę iš oficialios AMD websvetainę. Norėdami gauti papildomų instrukcijų, susisiekite su Hesai technine pagalba.
Šiame vadove aprašomas PandarView 2.0.101. Palaikomi gaminių modeliai:
| Pandar40 Pandar 40M Pandar40P Pandar64 |
Pandar128E3X | PandarQT QT128C2X |
PandarXT PandarXT-16 XT32M2X |
AT128E2X | FT120 |
Montavimas
Atsisiųskite diegimą files iš Hesai pareigūno websvetainėje arba susisiekite su technine pagalba: www.hesaitech.com/en/download
| Sistema | Montavimas Files |
| Windows | PandarasView_Release_Win64_V2.x.xx.msi |
| Ubuntu | PandarasView_Release_Ubuntu_V2.x.xx.bin |
![]() Ubuntu paleiskite PandarView.sh į a file kelias, kuriame yra tik ASCII simboliai.
Ubuntu paleiskite PandarView.sh į a file kelias, kuriame yra tik ASCII simboliai.
Programinės įrangos sąsaja yra padalinta į keturias dalis, kaip parodyta žemiau (išsami informacija gali skirtis).
„Apie“ meniu juostoje rodo programinės įrangos versiją.
Patikrinkite „Live Point Cloud“.
Norėdami gauti duomenis kompiuteryje, nustatykite kompiuterio IP adresą į 192.168.1.100 ir potinklio kaukę į 255.255.255.0
| Ubuntui: | „Windows“: |
| Įveskite šią komandą ifconfig į terminalą: ~$ sudo ifconfig enp0s20f0u2 192.168.1.100 (pakeiskite enp0s20f0u2 vietinio Ethernet prievado pavadinimu) |
Atidarykite tinklo bendrinimo centrą, spustelėkite „Ethernet“ Lauke „Ethernet Status“ spustelėkite „Ypatybės“ Dukart spustelėkite „Internet Protocol Version 4 (TCP/IPv4)“ Konfigūruokite IP adresą į 192.168.1.100 ir potinklio kaukę į 255.255.255.0 |
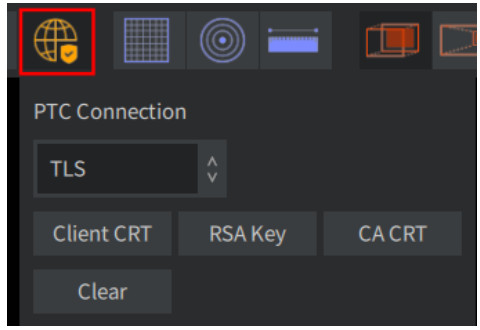
3.1 Kibernetinio saugumo konfigūracija
Produktų modeliams, palaikantiems kibernetinį saugumą, ![]() (Kibernetinis saugumas) bus rodomas įrankių juostoje.
(Kibernetinis saugumas) bus rodomas įrankių juostoje.
Vartotojai gali pasirinkti vieną iš trijų režimų:
■ TLS režimas
TLS režimu, PandarView 2 automatiškai nuskaito lidaro įrenginio pataisą files naudojant PTCS (PTC per TLS) komandas.
| Apsaugos puslapis web kontroliuoti | ĮJUNKITE pagrindinį kibernetinio saugumo jungiklį. |
| Pasirinkite TLS PTC ryšiui. | |
| PandarasView 2 | Pasirinkite TLS PTC ryšiui. |
| Spustelėkite mygtuką „CA CRT“ ir nurodykite file Hesai CA sertifikatų grandinės kelias (Hesai_Ca_Chain.crt). |
■ mTLS režimas
mTLS režimu, PandarView 2 automatiškai nuskaito lidaro įrenginio pataisą files naudojant PTCS komandas.
| Apsaugos puslapis web kontroliuoti | ĮJUNKITE pagrindinį kibernetinio saugumo jungiklį. |
| Pasirinkite mTLS PTC ryšiui; įkelti vartotojo CA sertifikatų grandinę. | |
| PandarasView 2 | Pasirinkite mTLS PTC ryšiui. |
| Spustelėkite mygtuką „CA CRT“; nurodykite file Hesai CA sertifikatų grandinės kelias (Hesai_Ca_Chain.crt). | |
| Spustelėkite mygtuką „Client CRT“; nurodykite file vartotojo galutinio subjekto sertifikato kelias. | |
| Spustelėkite mygtuką „RSA raktas“; nurodykite file vartotojo privataus rakto kelias (atitinka vartotojo galutinio subjekto sertifikatą). |
![]() Mygtukas „Išvalyti“ pašalina nurodytą file CA CRT, kliento CRT ir RSA rakto keliai.
Mygtukas „Išvalyti“ pašalina nurodytą file CA CRT, kliento CRT ir RSA rakto keliai.
■ Kibernetinis saugumas IŠJUNGTAS
Šiuo režimu PandarView 2 automatiškai nuskaito lidaro įrenginio pataisą files naudojant PTC komandas.
| Apsaugos puslapis web kontroliuoti | IŠJUNKITE pagrindinį kibernetinio saugumo jungiklį |
| PandarasView 2 | PTC ryšiui pasirinkite Non-TLS |
3.2 Gaukite tiesioginius duomenis
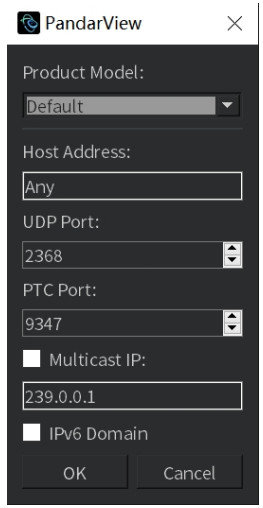
- Įrankių juosta:
 (Listen Net)
(Listen Net) - Iššokančiajame dialogo lange:
| Produkto modelis | Numatytoji |
| Priimančiojo adresas | Bet koks |
| UDP prievadas | Turėtų būti toks pat kaip „Lidar Destination Port“ nustatymų puslapyje web kontrolė. 2368 pagal numatytuosius nustatymus. |
| PTC prievadas | Naudojamas PTC komandoms perduoti. 9347 pagal numatytuosius nustatymus. |
| Multicast IP | Multicast režimu pažymėkite žymimąjį laukelį ir nurodykite daugialypės terpės siuntimo grupę |
| IPv6 domenas | Palaikoma tik tam tikruose gaminių modeliuose |
![]() Gaudami tiesioginius duomenis:
Gaudami tiesioginius duomenis:
- Vartotojai gali eksportuoti kampo korekciją file ir šaudymo laiko korekcija file, žr. 5.1 skyrių (Taškinio debesies korekcija).
 (Tiesioginės transliacijos) mygtukas konsolėje leidžia minimaliai vėluoti tiesioginius duomenis.
(Tiesioginės transliacijos) mygtukas konsolėje leidžia minimaliai vėluoti tiesioginius duomenis.
![]()
3.3 Tiesioginių duomenų įrašymas
Spustelėkite ![]() (Įrašyti) konsolėje ir nurodykite a file katalogas. Spustelėkite „Išsaugoti“, kad pradėtumėte įrašyti .pcap file.
(Įrašyti) konsolėje ir nurodykite a file katalogas. Spustelėkite „Išsaugoti“, kad pradėtumėte įrašyti .pcap file.
![]() Vardinant .pcap files Ubuntu, įskaitant filevardo plėtinys (.pcap).
Vardinant .pcap files Ubuntu, įskaitant filevardo plėtinys (.pcap).
Play Back Point Cloud
4.1 Atidarykite .PCAP File
- Spustelėkite
 (Atviras File) įrankių juostoje ir pasirinkite .pcap file iššokančiajame lange.
(Atviras File) įrankių juostoje ir pasirinkite .pcap file iššokančiajame lange.
Arba vilkite .pcap file į PandarąView 2. - Kai įkėlimas bus baigtas, konsolėje pasirodys taškų debesies takelis.

![]() Pastabos
Pastabos
- Palaikykite tik tcpdump pcap formatą.
- Vienu metu palaikykite tik vieną taško debesies takelį: kai gaunate tiesioginius duomenis arba atidarote naują .pcap file, ankstesnis takelis bus automatiškai ištrintas.
- Didelis .pcap files įkėlimas gali užtrukti. Įkeldami spustelėkite (Tiesioginė transliacija), kad vienu metu paleistumėte taškų debesies duomenis.
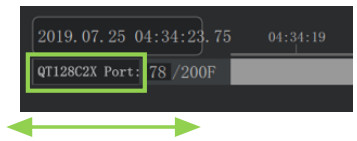
- Jei ne visas „Lidar“ gaminio modelis ir prievado numeris, slinkite pelės ratuku.
4.2 Play Control 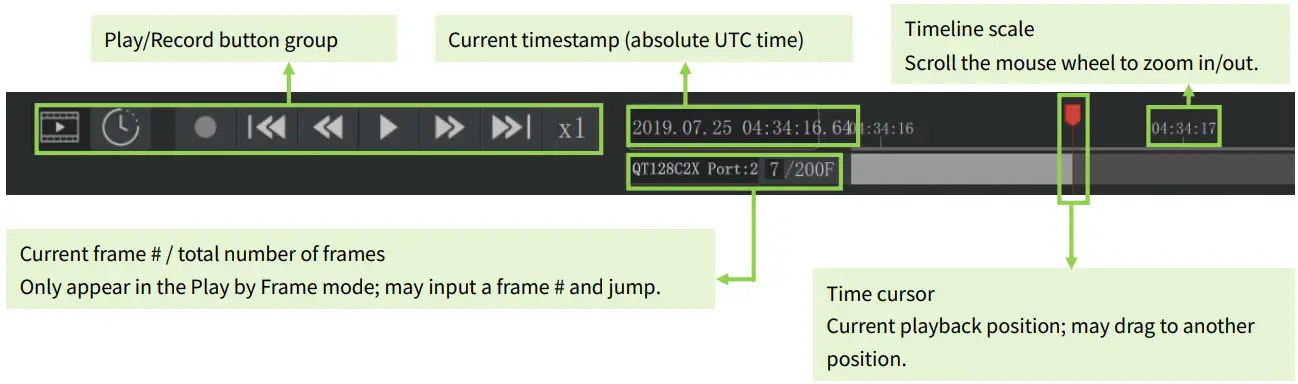
| Mygtukas | Aprašymas |
 |
Kairėje: žaisti pagal kadrą (numatytasis) Dešinėje: žaisti pagal laiką |
 |
Peršokti į pradžią arba pabaigą file |
 |
Kairėje: reguliuokite atsukimo greitį (1x, 1/2x, 1/4x, 1/8x, …, 1/64x) Dešinėje: reguliuokite persiuntimo greitį (1x, 2x, 4x, 8x, …, 64x) |
 |
Kairėje: po pakrovimo a file, spustelėkite norėdami žaisti. Teisingai: žaidžiant a file, spustelėkite norėdami pristabdyti. |
 |
Rodyti esamą greitį |
| Kraunant a file, spustelėkite, jei norite žaisti iš karto. (Šis mygtukas dingsta, kai įkeliama.) Kai gaunate tiesioginius duomenis, spustelėkite, kad srautas būtų perduodamas su minimalia delsa. |
Koregavimas ir konfigūravimas
Tikrinant tiesioginį taškų debesį arba atkuriant įrašytą taškų debesį, taisymas files ir konfigūracija files gali būti naudojami.
5.1 Taškinio debesies korekcija
| Kampo korekcija | Pataisykite azimuto ir aukščio duomenis. Žr. lidar vartotojo vadovo 1.3 skyrių (Kanalų paskirstymas). |
| Priešgaisrinė korekcija | Tam tikriems gaminių modeliams: pataisykite taškų debesies duomenų azimutą pagal kiekvieno kanalo suaktyvinimo laiką. |
| Atstumo korekcija | Tam tikriems gaminių modeliams: pataisykite atstumo duomenis. |
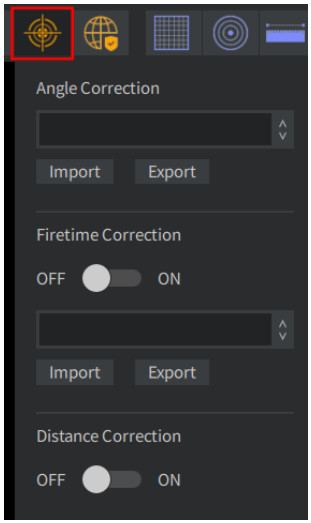
Spustelėkite ![]() (Pataisymas) įrankių juostoje:
(Pataisymas) įrankių juostoje:
| Korekcijos tipas | Aprašymas |
| Kampo korekcija | Tikrindami tiesioginį taškų debesį: • PandarasView 2 automatiškai nuskaito pataisą file šio lidaro vieneto. Atkuriant įrašytą taškų debesį: • PandarasView 2 automatiškai įkelia bendrą pataisą file šiam gaminio modeliui. • Norėdami gauti geriausią vaizdą, spustelėkite „Importuoti“ ir pasirinkite pataisą file šio lidaro vieneto. |
| Priešgaisrinė korekcija | QT128C2X: • Tikrindami tiesioginį taškų debesį: PandarView 2 automatiškai nuskaito pataisą file šio lidaro vieneto; perjunkite į ON ir pradėkite taisymą. • Atkuriant įrašytą taškų debesį: PandarView 2 automatiškai įkelia bendrą pataisą file šiam gaminio modeliui; perjunkite į ON ir pradėkite taisymą. Kiti gaminių modeliai: • Perjunkite į ON, spustelėkite „Importuoti“ ir pasirinkite pataisą file šio lidaro vieneto. • Jei lidaro vieneto korekcija file nėra vietoje, perjunkite į ON ir pasirinkite bendrą taisymą file šiam gaminio modeliui išskleidžiamajame meniu. |
| Atstumo korekcija | Perjunkite į ON. |
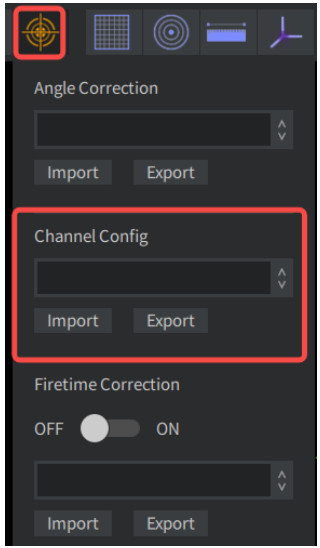
5.2 Kanalo konfigūracija
Kanalo konfigūracija file parenka poaibį iš visų galimų lidar kanalų, apibrėžia blokų skaičių taško debesies duomenų pakete ir nurodo kanalus, kurie turi būti saugomi kiekviename bloke.
Galima tik QT128C2X:
- Tikrindami tiesioginį taškų debesį: PandarView 2 automatiškai nuskaito kanalo konfigūraciją file šio lidaro vieneto.
- Atkuriant įrašytą taškų debesį: spustelėkite
 (Pataisa) įrankių juostoje, kanalo konfigūracijos skiltyje spustelėkite „Importuoti“ ir pasirinkite kanalo konfigūraciją file šio lidaro vieneto.
(Pataisa) įrankių juostoje, kanalo konfigūracijos skiltyje spustelėkite „Importuoti“ ir pasirinkite kanalo konfigūraciją file šio lidaro vieneto.
5.3 File Importas ir eksportas
File importuoti
- Tikrindami tiesioginį taškų debesį, mygtuką „Eksportuoti“ galima naudoti pataisai arba konfigūracijai atsisiųsti files šio lidaro vieneto.
- Vardinant šiuos files Ubuntu, būtinai įtraukite filevardo plėtinys (.dat kampo korekcijai files iš AT šeimos ir .csv kitiems).
File eksportuoti
- Importuotas pataisymas arba konfigūracija files pridedami išskleidžiamojo meniu apačioje.
- Jei jums jų nebereikia files, galite juos ištrinti iš šio kelio (galioja iš naujo paleidus PandarView 2): Dokumentai\PandarViewDuomenysFiles\csv
Kitos funkcijos
6.1 Pelės spartieji klavišai
| Kairiojo mygtuko vilkimas | Pasukite taško debesį |
| Dešinysis mygtukas Vilkite | Priartinimas / atitolinimas: vilkite į kairę, kad sumažintumėte mastelį, ir į dešinę, kad padidintumėte |
| Slinkite ratuku | Priartinimas / atitolinimas: slinkimas žemyn, jei norite atitolinti, ir aukštyn, kad priartintumėte |
| Paspauskite ratuką ir vilkite | Panardinkite view |
| Shift ir kairiojo mygtuko vilkimas | Sukite taškinį debesį aplink viewkryptis (kryptis nuo viewnurodykite koordinačių pradžią) |
| Shift & Dešinysis mygtukas Vilkite | Panardinkite view |
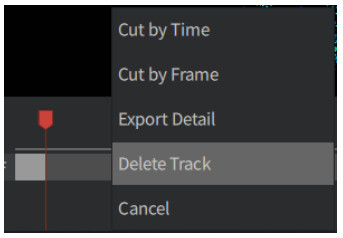
6.2 Taškiniai debesų takeliai
Dešiniuoju pelės mygtuku spustelėkite taškų debesies takelį:
| Iškirpti pagal laiką | Nurodykite pradžios / pabaigos laikąamps, iškirpti dabartinį takelį ir išsaugoti naujame .pcap file. |
| Iškirptas pagal rėmelį | Nurodykite pradžios / pabaigos kadrus, iškirpkite dabartinį takelį ir išsaugokite naujame .pcap file. |
| Eksportuoti išsamią informaciją | Pasirinkę taškų sritį (žr. 6.3 skyrių Įrankių juosta – Taškų pasirinkimas ir duomenų lentelė), nurodykite pradžios/pabaigos kadrus ir eksportuokite atitinkamus taškų debesies duomenis į .csv. files. · Naudokite · Vardinant šiuos files Ubuntu, būtinai įtraukite filevardo plėtinys (.csv). |
| Ištrinti takelį | Ištrinti dabartinį takelį. |
| Atšaukti | Uždarykite dešiniuoju pelės klavišu esantį meniu. |
6.3 Įrankių juosta
Jei PandarasView 2 langas per siauras, kad būtų rodoma visa įrankių juosta, slinkite pelės ratuką iki view visi mygtukai.
■ Koordinačių tinkleliai, koordinačių sistema ir atstumo matavimas 
| Mygtuko pavadinimas | Funkcija |
| Dekarto | Rodyti/slėpti tinklelius 30 m atstumu |
| Poliarinis | Rodyti / slėpti vienodo atstumo apskritimus 10 m atstumu |
| Valdovas | Kairysis mygtukas vilkite, kad išmatuotų atstumą tarp dviejų taškų |
| Koordinatės | Parodykite stačiakampę koordinačių sistemą |
■ Projekcijos režimai

| Mygtuko pavadinimas | Funkcija |
| Ortografinė projekcija | – |
| Perspektyvinė projekcija | – |
■ Point of View ir Verpimas
| Mygtuko pavadinimas | Funkcija |
| Priekyje / gale / kairėje / dešinėje / viršuje | – |
| Sukite | Sukite viewkryptis (kryptis nuo viewtaškas į koordinačių pradžią) aplink Z ašį |
■ Kanalo pasirinkimas 
Spustelėkite ![]() (Kanalai) į view arba pakeiskite šiuo metu rodomus kanalus.
(Kanalai) į view arba pakeiskite šiuo metu rodomus kanalus.
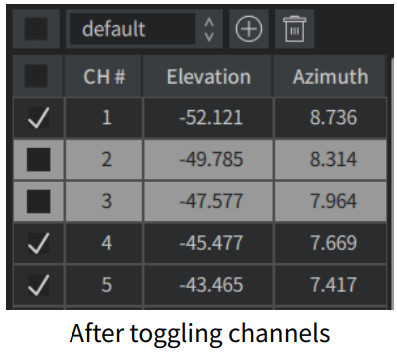
Rodyti arba slėpti kanalus
- Pažymėkite / atžymėkite langelius kiekvieno kanalo kairėje, kad būtų rodomi / paslėpti jo taškų debesies duomenys.
- Pagal numatytuosius nustatymus rodomi visi kanalai.
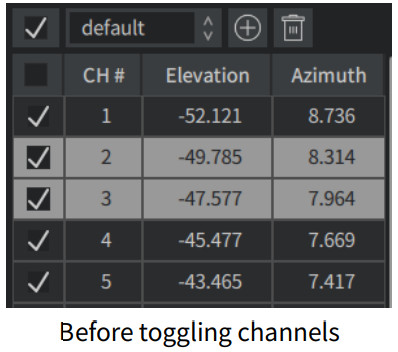
Pasirinkite ir perjunkite kanalus
- Spustelėkite kanalą (išskyrus jo žymės langelio sritį), kad pasirinktumėte ir paryškintumėte šį kanalą.
- Spustelėdami laikykite nuspaudę klavišą Shift, kad pasirinktumėte kelis gretimus kanalus.
- Norėdami pasirinkti kelis atskirus kanalus, laikykite nuspaudę Ctrl.
- Spustelėkite
 (Perjungti pasirinktus kanalus) viršutiniame kairiajame kampe, kad perjungtumėte pasirinktus kanalus tarp pažymėtų ir nepažymėtų.
(Perjungti pasirinktus kanalus) viršutiniame kairiajame kampe, kad perjungtumėte pasirinktus kanalus tarp pažymėtų ir nepažymėtų.
Išsaugoti kanalų grupes
- Spustelėkite
 pažymėtus kanalus išsaugoti kaip konfigūraciją ir pavadinti.
pažymėtus kanalus išsaugoti kaip konfigūraciją ir pavadinti. - Iš naujo paleidus Pandar egzistuoja anksčiau išsaugotos konfigūracijosView 2 ir gali būti pasirinktas
 išskleidžiamasis meniu.
išskleidžiamasis meniu. - Norėdami ištrinti šiuo metu pasirinktą konfigūraciją, spustelėkite
 .
.
■ Taško pasirinkimas ir duomenų lentelė
Spustelėkite ![]() (Pasirinkite) ir vilkite pelę, kad paryškintumėte taškų sritį.
(Pasirinkite) ir vilkite pelę, kad paryškintumėte taškų sritį.
Spustelėkite ![]() (Skaičiuotuvas) į view paryškintų taškų duomenis, kaip parodyta toliau.
(Skaičiuotuvas) į view paryškintų taškų duomenis, kaip parodyta toliau. 
Du kartus spustelėjus lauko antraštę kelis kartus, po vieną atliekami šie veiksmai:
- Pritaikykite stulpelio plotį prie lauko pavadinimo
(Arba uždėkite pelės žymeklį tarp dviejų antraščių, kad žymeklis taptų rodykle į kairę-dešinę; vilkite pelę, kad sureguliuotumėte stulpelio plotį.) - Rūšiuoti šį lauką didėjimo tvarka. Rodyklė aukštyn
 pasirodys dešinėje.
pasirodys dešinėje. - Rūšiuoti šį lauką mažėjimo tvarka. Rodyklė žemyn
 pasirodys dešinėje.
pasirodys dešinėje. - Atšaukti rūšiavimą.
Mygtukų grupė viršutiniame kairiajame kampe:

| Pasirinkite Viskas | Spustelėkite, kad būtų rodomi visų šio rėmelio taškų duomenys. Spustelėkite dar kartą, kad būtų rodomi tik pasirinktų taškų duomenys. |
| Informacija apie taškus | Eksportuokite dabartinę duomenų lentelę į .csv file. |
| Išsaugoti stulpelių tvarką | Išsaugokite esamą lauko tvarką. Šis nustatymas galioja ir iš naujo paleidus PandarView 2. |
Duomenų lentelės laukai apibrėžti toliau:
| Ch | Kanalas Nr. |
| AziCorr | Azimutas pataisytas kampo korekcija file |
| atstumas | Atstumas |
| Rfl | Atspindėjimas |
| Azi | Azimutas (dabartinis rotoriaus atskaitos kampas) |
| Ele | Pakilimas |
| t | Laikuamp |
| Laukas | AT šeimos gaminių modeliams: veidrodinis paviršius, ant kurio atliekamas šis matavimas. 1/2/3 laukai atitinka atitinkamai veidrodinius paviršius 0/1/2. |
| AziState | Azimuto būsena Naudojamas kiekvieno kanalo degimo laiko poslinkiui apskaičiuoti; tik tam tikriems lidar modeliams. |
| pasitikėjimą | Pasitikėjimas |
■ Kiti ekrano valdikliai 
| Mygtuko pavadinimas | Funkcija |
| Filtruoti | Apibrėžkite taškų debesies rodymo diapazoną. |
| Lazerinis sekimas | Parodykite šio lidaro įrenginio lazerio spindulius. |
| Valstybės informacija | Rodyti būsenos informaciją apatiniame kairiajame taškų debesies rodymo srities kampe, pvz., variklio greitis, grįžimo režimas ir .PCAP pavadinimas file. |
| Išmeskite PCD | Iškelkite dabartinį kadrą į .pcd (Point Cloud Data) file ir nurodykite file vieta. |
| Spalvų žemėlapis | Nustatykite taškų debesies ekrano spalvų schemą. |
| Taško dydis | Nustatykite duomenų taškų rodymo dydį. |
| Grįžimo režimas | Pasirinkite grąžinimus, kurie bus rodomi. |
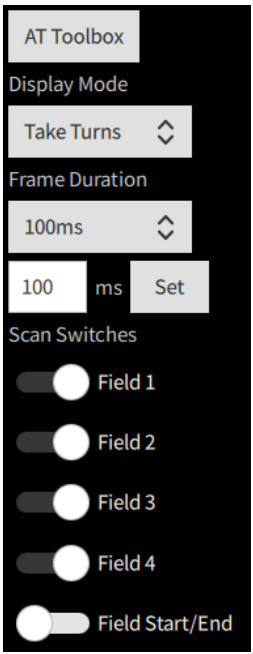
■ AT Family Toolbox
Produktų modeliams, kurie priklauso AT šeimai. 
| Ekrano režimas | Paeiliui (numatytasis): matmenys iš veidrodinių paviršių 0/1/2 atitinkamai išvedami į kadrus 0/1/2. Rėmeliai nesusiūti. Derinys: veidrodinių paviršių 0/1/2 išmatavimai išvedami į vieną kadrą. Tai reiškia, kad trys rėmeliai yra susiuvami kaip vienas. Tradicija: veidrodinių paviršių 0/1/2 išmatavimai išvedami į vieną kadrą pagal jų kodavimo kampus taško debesies duomenų paketuose. Kampo korekcija neatliekama. |
| Kadro trukmė | Taškinio debesies rodymo laiko langas Atkūrimo pagal laiką režimu (žr. 4.2 skyrių Atkūrimo valdymas) bus rodomi visi duomenų taškai šiame laiko lange. |
| Nuskaitymo jungikliai | Norėdami rodyti arba paslėpti kiekvieno veidrodžio paviršiaus matavimus. 1/2/3 laukai atitinka atitinkamai veidrodinius paviršius 0/1/2. 4 laukas nenaudojamas. |
| Lauko pradžia/pabaiga | Dar nepalaikoma |
Trikčių šalinimas
Jei toliau nurodytos procedūros negali išspręsti problemos, susisiekite su Hesai technine pagalba.
| Simptomai | Taškai, kuriuos reikia patikrinti |
| Lidar variklis veikia, bet išvesties duomenys negaunami nei Wireshark, nei PandarView. | Patikrinkite, ar: · tinkamai prijungtas eterneto kabelis (atjungiant ir vėl prijungiant); · „Lidar“ paskirties IP yra teisingai nustatytas puslapyje „Nustatymai“. web kontrolė; · Horizontalus FOV yra tinkamai nustatytas Azimuth FOV puslapyje web kontrolė; · Atnaujinimo puslapyje teisingai parodyta jutiklio programinės aparatinės įrangos versija web kontrolė; · Lidaras skleidžia lazerio šviesą. Tai galima patikrinti naudojant infraraudonųjų spindulių kamerą, infraraudonųjų spindulių jutiklio kortelę arba telefono kamerą be infraraudonųjų spindulių filtro. Vėl įjunkite, kad patikrintumėte, ar simptomas išlieka. |
| Gali gauti duomenis Wireshark, bet ne PandarView. | Patikrinkite, ar: · Nustatymų puslapyje „Lidar“ paskirties prievadas nustatytas teisingai web kontroliuoti · Kompiuterio ugniasienė išjungta arba ta PandarView pridedamas prie ugniasienės išimčių · jei VLAN įjungtas, kompiuterio VLAN ID yra toks pat kaip ir lidar · naujausias PandarView versija (žr. Hesai oficialaus atsisiuntimo puslapį websvetainėje arba susisiekite su Hesai technine pagalba) įdiegta kompiuteryje Vėl įjunkite, kad patikrintumėte, ar simptomas išlieka. |
I priedas Teisinis pranešimas
2021 m. autorių teisės priklauso Hesai Technology. Visos teisės saugomos. Draudžiama naudoti arba atgaminti šį vadovą dalimis arba visą be Hesai leidimo.
Hesai Technology neteikia jokių pareiškimų ar garantijų, nei išreikštų, nei numanomų, dėl šio turinio ir konkrečiai atsisako bet kokių garantijų, tinkamumo parduoti ar tinkamumo bet kokiam konkrečiam tikslui. Be to, Hesai Technology pasilieka teisę peržiūrėti šį leidinį ir retkarčiais keisti jo turinį, neįsipareigojant pranešti jokiam asmeniui apie tokį pataisymą ar pakeitimus.
HESAI ir HESAI logotipas yra registruotieji Hesai Technology prekių ženklai. Visi kiti prekių ženklai, paslaugų ženklai ir įmonių pavadinimai, nurodyti šiame vadove arba Hesai pareigūne websvetainė yra jų atitinkamų savininkų nuosavybė.
Į šį gaminį įtrauktos programinės įrangos autorių teisės yra užregistruotos pagal Hesai Technology. Jokiai trečiajai šaliai neleidžiama, išskyrus tuos atvejus, kai aiškiai leidžia licencijos išdavėjas arba aiškiai reikalaujama pagal taikomus įstatymus, dekompiliuoti, apsukti inžineriją, išardyti, modifikuoti, nuomoti, išnuomoti, skolinti, platinti, sublicencijuoti, kurti išvestinius kūrinius, pagrįstus visa ar bet kuria dalimi. programinės įrangos.
Hesai gaminio garantinio aptarnavimo vadovas yra Hesai pareigūno garantijos politikos puslapyje websvetainė: https://www.hesaitech.com/en/legal/warranty
Hesai Technology Co., Ltd.
Telefonas: +86 400 805 1233
Websvetainė: www.hesaitech.com
Adresas: Building L2, Hongqiao World Centre, Šanchajus, Kinija
Įmonės el. paštas: info@hesaitech.com
Paslaugos el. paštas: service@hesaitech.com