Vaizdo inžinerijos STEVE-6D vartotojo vadovas

1 ĮVADAS
STEVE-6D programinė įranga įvertina skaitmeninių fotoaparatų vaizdo stabilizavimo efektyvumą. Šis paveikslėlis iliustruoja buvample setup analizuoti mažo kontrasto pasvirusius kraštus naudojant TE261 bandymo diagramą. Fotoaparatas pritvirtinamas prie STEVE-6D ir vibruojamas, kol įjungiama ir išjungiama fotoaparato vaizdo stabilizavimo funkcija, kad būtų galima užfiksuoti vaizdus skirtingu ekspozicijos laiku. Iš čia programinė įranga analizuoja neryškių pasvirusių kraštų kraštų plotį ir apskaičiuoja stabilizavimo efektyvumą f-stop. Ši programinė įranga taip pat gali valdyti iQ-Trigger ir STEVE-6D aparatinę įrangą su sinusinės bangos generatoriumi, pritaikytomis vartotojo bangų formomis arba CIPA pasirinktiniu rankos paspaudimu.

STEVE-6D – „Iki rakto“ sprendimas
GRAFINĖ VARTOTOJO SĄSAJA
STEVE-6D programinė įranga yra padalinta į du pagrindinius modulius: vienas skirtas ryšiui su STEVE-6D aparatine įranga, o kitas – vaizdo stabilizavimo efektyvumui apskaičiuoti [1].

STEVE-6D vibracijos valdymo modulis
Vibracijos valdymo modulis
„VIBRATION CONTROL“ modulis nustato bangos formos duomenis ir valdo sąsają tarp
STEVE-6D ir iQ-Trigger. „VIBRATION CONTROL“ yra padalintas į keturias skirtingas dalis, pirmoji dalis [2] perjungiama tarp šių skirtukų.
Ryšio skirtukas
Norėdami užmegzti ryšį su STEVE-6D, spustelėkite mygtuką „Prisijungti“ [1] ir STEVE-6D automatiškai nukreips visas šešias ašis į nulinę padėtį. Norėdami atjungti, spustelėkite raudoną mygtuką [2]
teisingai. Užvedus pelės žymeklį virš informacijos elemento [3], patarime bus parodyta informacija apie prijungtą valdiklį, pvz., serijos numeris ir programinės įrangos versija.

Ryšio skirtukas
Išankstinių nustatymų skirtukas
Kameros sistemą galima lengvai suderinti apibrėžiant sukimosi tašką, žinomą kaip sukimosi taškas [1], ir vietinę pradinę / nulinę padėtį [2]. Kiekviena bangos formos duomenų kreivė nurodo šią padėtį.
Numatytasis sukimosi taškas (x=y=z=0) yra atraminės plokštės apačioje, centre. Galite pakeisti jo padėtį į tai, kas geriausia jūsų programai. Pavyzdžiui,ampNaudojant mobilųjį telefoną, prasminga nustatyti sukimosi tašką į telefono centrą, nes tai paprastai yra sukimosi centras, kai vartotojas jį laiko. Tačiau SLR fotoaparatas tikriausiai turi skirtingą sukimosi centrą dėl labai skirtingos geometrijos

Išankstinių nustatymų skirtukas
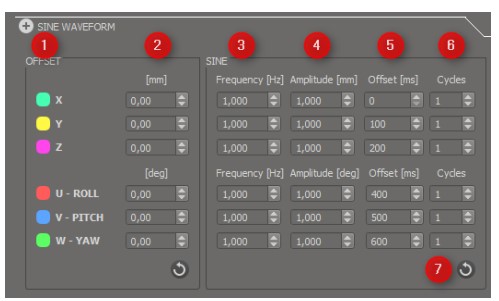
Sinusinės bangos formos skirtukas
Kiekvienos ašies sinusinės bangos generatorius sukuria greitą bangos formos duomenų nustatymo būdą. Norėdami apibrėžti naują bangos formą, pakeiskite poslinkio reikšmes, susijusias su padėtimi [2], dažniu [3], ampšviesa [4] ir
laiko poslinkis [5]. Sukimo langelis „Ciklai“ [6] apibrėžia, kaip dažnai sinusas turi kartotis. Norėdami atlikti bangos formą, spustelėkite mygtuką „PERkelti“. Spustelėkite mygtuką apatiniame dešiniajame kampe [7].
Sinusinės bangos formos skirtukas
CIPA rankos paspaudimo skirtukas
Norėdami atlikti bet kurį iš trijų CIPA rankų paspaudimų, pirmiausia pasirinkite optinės sistemos svorį. Iš ten bangos formos duomenys automatiškai įkeliami į STEVE-6D valdiklį ir prasideda judėjimas
paspaudus mygtuką MOVE. Dėl CIPA neatskleidimo sutarties „WAVEFORM PLOT“ yra tik buvęsample
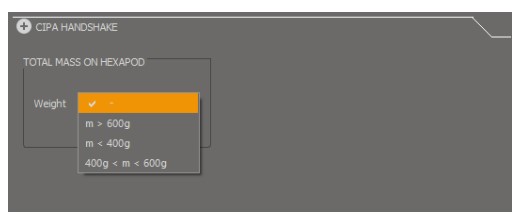
CIPA rankos paspaudimo skirtukas
Individualios bangos formos skirtukas
Pagal standartinę bangos formą
Įkelkite tinkintą signalo formą į STEVE-6D sukurdami paprastą .txt failą file su Dekarto koordinatėmis. Visos reikšmės turi būti atskirtos tabuliavimo taškais. Ašių seka yra XYZUV W. Nustatykite samplinguoti bangos formos greitį STEVE-6D programinėje įrangoje ir įkelti .txt file į programinę įrangą. Visos koordinatės yra nepriklausomai nuo sukimosi taško ir nustatymo padėties. Signalo formos įkėlimas pradedamas automatiškai po .txt file įkeliama į STEVE-6D programinę įrangą. File standartinės bangos formos apibrėžimas: (naudokite skirtuką kaip skyriklį)

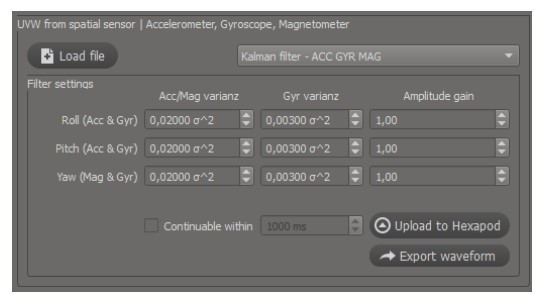
Pagal erdvinius duomenis
Analizuodami įrenginius, tokius kaip išmanieji telefonai (akcelerometras, giroskopas, magnetometras), naudokite erdvinių jutiklių duomenis. Norėdami gauti tikslesnes sukimosi vertes, nustatykite Acc/Mag & Gyr varianto parametrą.
The ampšviesos padidėjimas skirtas tik mastelio keitimui ampšviesa. Kai visi parametrai bus nustatyti, spustelėkite įkėlimo į šešiakampį mygtuką, kad pradėtumėte judėjimą. Tęsiamasis žymimasis langelis leis vartotojui nustatyti trukmę, per kurią bangos forma tęsis tol, kol pradinė padėtis skiriasi nuo galinės padėties. Taip pat yra galimybė naudoti tik akselerometro arba giroskopo duomenis.
Signalo formos eksportavimo mygtukas gali būti naudojamas signalo formai išsaugoti ir IS našumui apskaičiuoti. Duomenys samplingo dažnis yra 1000 Hz
Erdvinio jutiklio nustatymai
File Erdvinio jutiklio UVW apibrėžimas:
| HH:MM:SS.ZZZZ | AccX[g] | AccY[g] | AccZ[g] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | Mag[µt] | Mag[µt] | Mag[µt] |
Trigger skirtukas
Nuotolinį fotoaparato atleidimą galima atlikti naudojant „iQ-Trigger“. Galima nustatyti kelis išleidimo laikus spustelėjus „WAVEFORM PLOT“ arba rankiniu būdu pasirinkus laiką „iQ-Trigger“ skirtuke [3]. Jei reikalingas atsitiktinis atleidimo laikas, apibrėžkite išleidimo skaičių pagal bangos formą [2]. Kiekvieną iQ-Trigger atleidimą apibrėžia fotografavimo delsa, atleidimo trukmė ir delta laikas tarp dviejų fotoaparato paleidimų [1].

Vertikalios linijos rodo „Digitus“ išleidimo laiką
Siųsti į aparatinę įrangą, būseną ir vaizdų / bangos formų skaičių
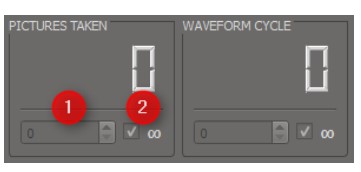
Visa informacija apie ryšio būseną arba klaidas rodoma „STATUS“ srityje. Norėdami pradėti judesį, paspauskite mygtuką „MOVE“. Spustelėjus mygtuką „Pagrindinė padėtis“, STEVE-6D pereina tiesiai į pradinę padėtį, kuri buvo nustatyta anksčiau skirtuke „IŠANKSTINIAI NUSTATYMAI“. Jei reikia iš naujo kalibruoti STEVE-6D, spustelėkite mygtuką „Reference Platform“. Apibrėžiant „PICTURE TAKEN“ arba „WAVEFORM CYCLE“ reikšmę, STEVE-6D judėjimą galima sustabdyti automatiškai. Nustatykite reikšmę į neribotą [2] arba pasirinkite skaičių [1], kurį turi suaktyvinti iQ-Trigger, arba vykdyti bangos formą, reikšmę.
Analizuoti duomenis
Modulis „Analizuoti duomenis“ atlieka vaizdo stabilizavimo skaičiavimus. Šį modulį sudaro trys svarbios dalys. Pirmoji dalis yra „Metaduomenų įrankis“ [1], kuris nustato fotoaparato metaduomenis. Antras
dalis yra vaizdų paketinis apdorojimas IS našumo skaičiavimui [2]. Paskutinėje dalyje rodomi užfiksuotų vaizdų rezultatai.
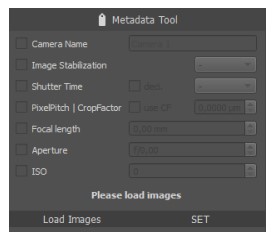
Metaduomenys
Labai svarbu turėti fotoaparato metaduomenų informaciją IS našumo skaičiavimams, pvz., pikselių žingsnį ir užrakto laiką. Jei fotoaparatas šios informacijos neįrašo vaizde file, įkelkite vaizdų paketą ir rankiniu būdu įrašykite juos į .jpg vaizdą. Įkelkite vaizdus, nustatykite parametrus ir paspauskite mygtuką „SET“.
TIK JPEG VAIZDAI
Įkelkite vaizdus IS-našumo skaičiavimui
Įkėlę etaloninę seriją, pasirinkite IS-ON bandymo seriją. Reikalinga bent viena vaizdų serija, skirta ISOFF. Jei buvo naudojama CIPA rankos paspaudimo signalo forma, IS-OFF bandymų serija nereikalinga.
Vietoj to spustelėkite CIPA mygtuką ir pasirinkite fotoaparato svorį. Vaizdus iš tinkintų bangos formų matavimų galima įkelti spustelėjus pasirinktinių judesio duomenų mygtuką. Vaizdo analizės centras
tik“ galimas žymimasis laukelis, kad duomenys būtų greitesni, bet ne tokie tikslūs. Pasirinkus šią parinktį, skaičiavimo metu naudojamas tik vidurinio krašto langelis.

Pasirinkus parinktis, medis view bus rodoma skirtingų serijų, kaip parodyta toliau. Jei vaizdo metaduomenų nėra, naudokite „Metaduomenų įrankį“, kuris rodomas klaidos pranešimu
po to, kai vaizdai įkeliami į STEVE-6D programinę įrangą. Kai baigsite, vaizdo stabilizavimo efektyvumo skaičiavimą galima pradėti spustelėjus mygtuką „Apdoroti“. Rezultatas file su vieno krašto pločio skaičiavimai bus išsaugoti aplanke su vaizdais.
| Galiojimo laikas [s] | Aukštis [piks.] | Yaw [piksas] | Sqrt (p^2+y^2) |
IS-našumas
Krašto plotis apskaičiuoja IS-našumą μm, palyginti su ekspozicijos trukme. ISON ir IS-OFF (arba judėjimo duomenų) serijų kraštų pločiai konvertuojami į atviruko dydį su view65–80 cm atstumas šiam procesui atlikti. Vaizdo stabilizavimo efektyvumas f-stopuose [2] yra IS-ON ir IS-OFF kreivės susikirtimo taškuose, kurių nustatymo riba yra 63 μm [1]. Skaitinė IS-Performance reikšmė rodoma f-stopais.

Rezultatų duomenų pasirinkimas
Norėdami pasirinkti atskirus IS našumo skaičiavimo rezultatus, perkelkite vieną iš slankklių [1], skirtą „SERIJA“,
„EXPOSURE TIME“, „PICTURE“ arba „ROI“ (dominantis regionas). Šis veiksmas pakeis rodomą
krašto sklaidos funkcijos („ESF“) [3], erdvinio dažnio atsako („SFR“) [4] rezultatai ir
„INPUT IMAGE“ [5] skirtukas. Išsamią informaciją galima parodyti arba paslėpti mygtuku „INFO“ [6].

Krašto platinimo funkcija (ESF)
ESF apskaičiuoja kiekvieną krašto plotį. Taigi, persvaraampLED pasviręs vaizdo kraštas ROI apskaičiuojamas pagal kiekvieną vaizdą. Kiekviename paveikslėlyje yra dvidešimt nuožulnių kraštų, iš kurių dešimt yra žingsnyje ir
dešimt krypčių kryptimi.
Erdvinio dažnio atsakas (SFR)
SFR nenaudojamas IS našumui apskaičiuoti. Vietoj to, jis aprašo kiekvienos ROI moduliacijos perdavimo funkciją.
Įveskite vaizdą ir ROI pasirinkimą
Kiekvienam rezultatui galima pakeisti arba rodyti dominančią sritį. Spustelėkite mygtuką „Redaguoti ROI“ ir pakeiskite ROI vietą. Norėdami nustatyti naują ROI, spustelėkite mygtuką ir naudokite mygtuką „-“, norėdami ištrinti ROI. Norėdami padidinti mastelio efektą, spustelėkite mygtuką „Mastelio keitimas +“ ir nubrėžkite stačiakampį ant vaizdo.
Klaidų tvarkymas
Jei programinė įranga neaptinka visų 20 ROI viename iš vaizdų, įvesties vaizdų sąraše įvyko klaida view. Jei taip atsitiks, pasirinkite vaizdą ir rankiniu būdu nustatykite trūkstamas vaizdo ROI.
CAUTORIŲ TEISĖS INFORMACIJA
Įdiegdami šią programinę įrangą sutinkate ir sutinkate laikytis toliau pateiktų programinės įrangos licencijos sutarties sąlygų.
Autorių teisės © Image Engineering GmbH & Co. KG, 2021 m
Pagal šią sutartį teikiama programinė įranga teikiama tokia, kokia yra, be jokių tiesioginių ar numanomų garantijų ar pareiškimų, įskaitant, bet neapsiribojant, bet kokias numanomas tinkamumo parduoti ar tam tikram tikslui garantijas. Tik vartotojas turi nustatyti programinės įrangos tinkamumą konkrečiam tikslui ar naudojimui. Image Engineering GmbH & Co.
KG ir bet kas kitas, kuris dalyvavo kuriant, gaminant, tiekiant ar palaikant šią programinę įrangą, jokiu būdu nebus atsakinga už tiesioginę, netiesioginę, specialią, pasekminę ar atsitiktinę žalą, atsiradusią dėl bet kokio defekto, klaidos ar praleidimo. diskelyje ar programinėje įrangoje ar dėl bet kokių kitų įvykių, įskaitant, bet tuo neapsiribojant, bet kokį paslaugų teikimo nutraukimą, pelno ar prestižo praradimą, teisinius veiksmus ar bet kokią kitą pasekmę žalą. Vartotojas prisiima visą atsakomybę, atsirandančią naudojant šią programinę įrangą, už kurią Image Engineering GmbH & Co. KG neprisiima jokios atsakomybės, nepaisant to, ar toks naudojimas yra teisėtas ar numatomas. Image Engineering GmbH & Co. KG neprisiima jokios atsakomybės už jokius duomenis ar programas, saugomus arba naudojamus su šia programine įranga, įskaitant tokių duomenų ar programų atkūrimo išlaidas. Image Engineering GmbH & Co. KG pasilieka teisę bet kuriuo metu be įspėjimo pataisyti arba tobulinti pateiktą informaciją ir susijusią programinę įrangą.
Skaitykite daugiau apie šį vadovą ir atsisiųskite PDF:
Dokumentai / Ištekliai
 |
Vaizdo inžinerija STEVE-6D [pdf] Naudotojo vadovas STEVE-6D, STEVE |



